



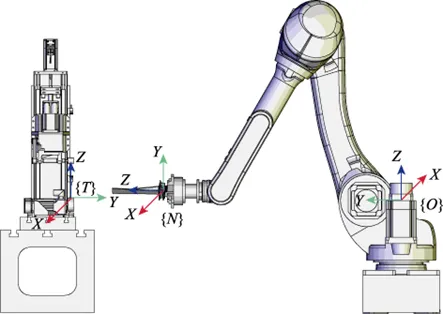
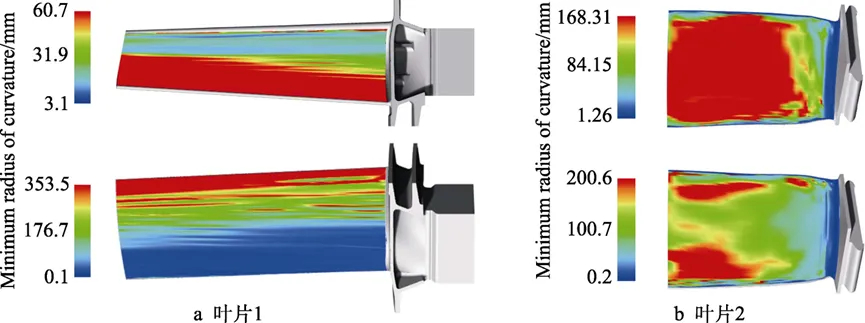
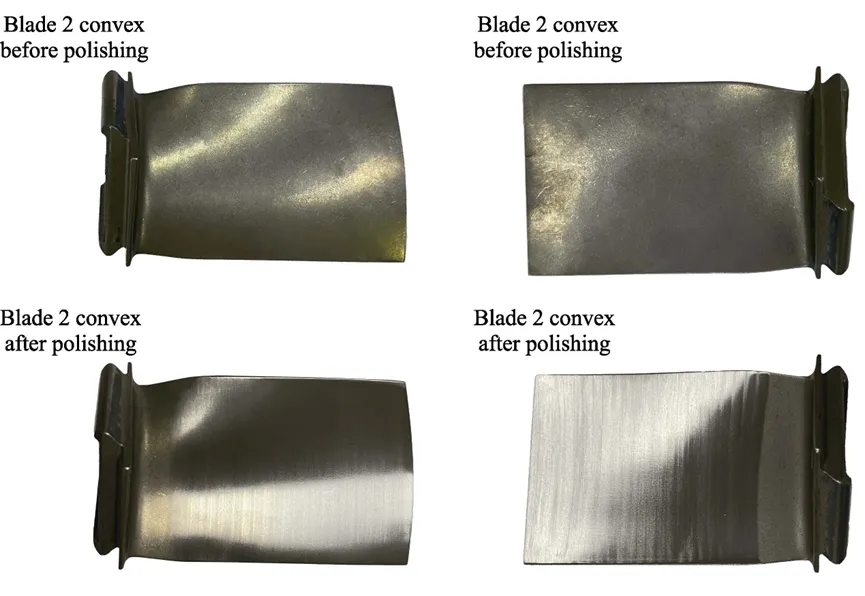
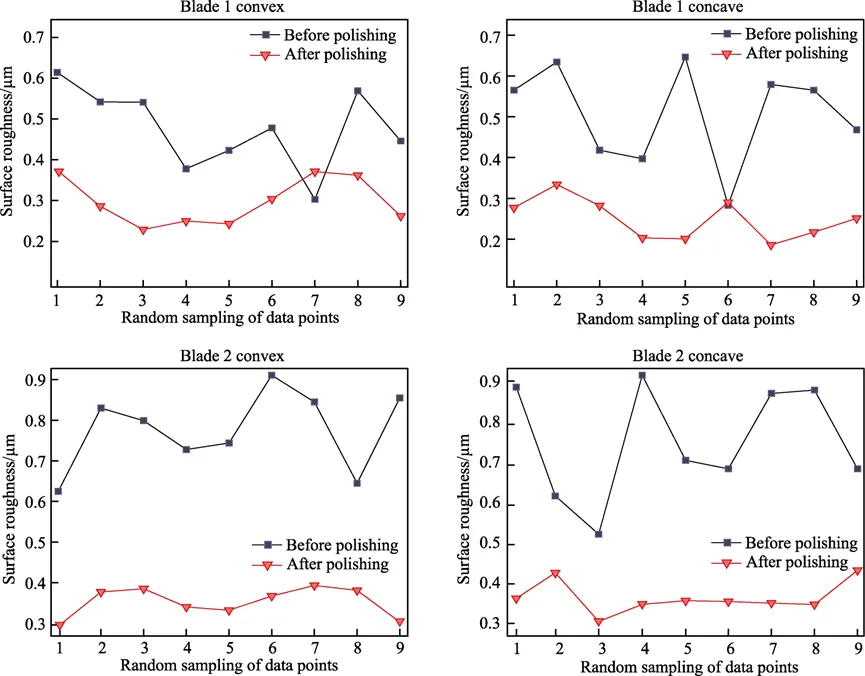
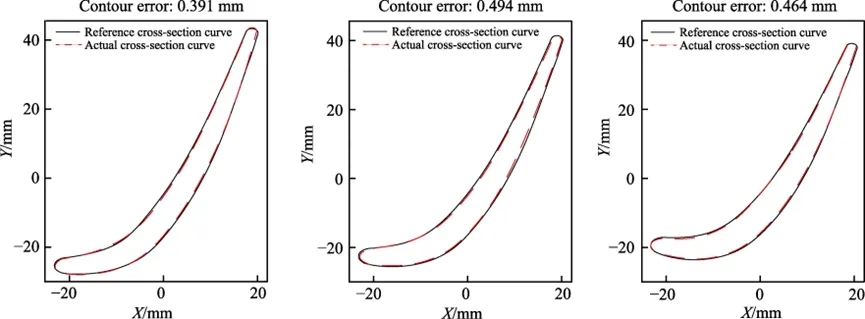
研究背景 航空发动机叶片在高温高压环境下工作,需承受巨大机械与热负荷,因此其制造质量至关重要。抛磨作为叶片精密制造的最后环节,直接影响零件外观和寿命,而机器人自动化抛磨已成为重要加工方式。相比国外采用机器人砂带或砂轮抛磨,我国多采用机器人与多台砂带机配合的方式,但因技术起步较晚,仍存在机器人“让刀”变形、刚性不足引发颤振等问题,导致加工精度难以保证。目前国内外双面抛磨技术主要基于数控机床,受限于机床运动行程,仅适用于中小型、小扭转直纹叶片,且难以实现自适应加工。 现有机器人抛磨轨迹规划研究主要从几何模型、接触力或材料去除廓形等角度展开,普遍将轨迹视为几何问题,但未充分考虑叶背与叶盆型面的关联性。为此,本文提出一种基于机器人第七轴的叶片双面对称抛磨路径规划方法,通过建立中弧线法线对称轨迹规划,减少加工变形误差,并构建姿态约束方程优化轨迹,同时开发第七轴控制模型以提升机器人运动稳定性,从而改善叶片表面质量一致性。 结论 针对具有叶身薄、叶形扭、变曲率特征的航空发动机叶片,本文提出一种基于机器人第七轴开发的双面对称抛磨路径规划方法。该方法以叶片中弧线为基准生成双侧对称抛磨路径,并以其法线为基础构建机器人姿态约束方程,同时规划第七轴运动轨迹以实现双轮同步抛磨。通过分析曲面曲率确定加工参数,并进行仿真与实验验证。结果表明:该方法能有效减小接触点法向偏差,使叶片表面粗糙度显著降低且更均匀,轮廓误差大幅减小,同时双面对称抛磨方式将加工时间缩短约一半,显著提升了叶片表面质量一致性与加工效率。 图文赏析 机器人进刀预状态 叶片表面最小曲率半径 抛磨路径接触点偏离误差对比图 叶片双面抛磨流程交互示意 叶片2抛磨前后表面对比图 叶片1、2抛磨前后表面粗糙度对比图 叶片1截面轮廓误差 引文格式: 马晓龙, 张学乾, 刘佳, 等. 基于机器人第七轴开发的航空发动机叶片双面对称抛磨路径规划方法[J]. 表面技术, 2025, 54(14): 128-140. MA Xiaolong, ZHANG Xueqian, LIU Jia, et al. Double-sided Symmetric Polishing Trajectory Planning Method for Aero-engine Blades Based on Robot Seventh Axis Development[J]. Surface Technology, 2025, 54(14): 128-140.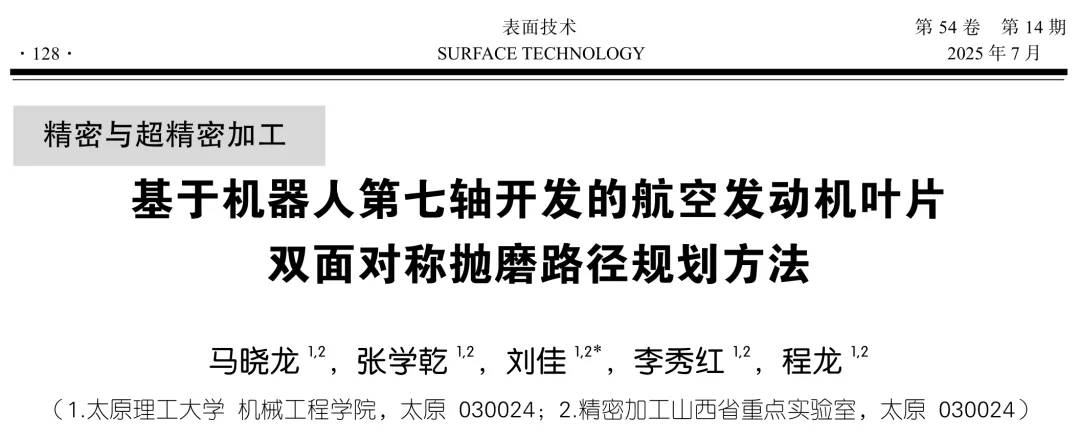

免责声明:本网站所转载的文字、图片与视频资料版权归原创作者所有,如果涉及侵权,请第一时间联系本网删除。

官方微信
《腐蚀与防护网电子期刊》征订启事
- 投稿联系:编辑部
- 电话:010-62316606
- 邮箱:fsfhzy666@163.com
- 腐蚀与防护网官方QQ群:140808414

“海洋金属”——钛合金在舰船的

腐蚀与“海上丝绸之路”